CUHK
News Centre
CUHK Research Team Enables Navigation and Localisation of Microrobotic Swarms in Blood Vessels
Drive Forward Transformation towards Medical Applications
A research team led by Professor Li Zhang, Associate Professor, Department of Mechanical and Automation Engineering at The Chinese University of Hong Kong (CUHK), has developed a new strategy to simultaneously control and track a microrobotic swarm in blood vessels in real-time. The swarm control and ultrasound imaging-integrated localisation strategies serve as an important intermediate step from a fundamental understanding of microrobotic swarms in dynamic environments to clinic applications, such as active targeted delivery and localised therapeutics. The related results have been recently published in Science Advances, a prestigious international scientific journal.
Micro- and nanorobots are small-scale mobile agents that can actively pass through narrow and confined spaces such as a capillary to perform specific tasks. This makes scientists think about its biomedical applications, for example, the targeted transport of therapeutic agents to lesions deep in the body. Usually, each microrobot has a very limited capacity, thus, hundreds of thousands are needed to deliver enough drugs to achieve a curative aim.
Real-time swarm control and localisation in blood vessels remain challenging when delivering the microrobotic swarms in the vascular system, as its formation, navigation, and localisation become very different and tricky in flowing and pulsatile flowing environments. Previously, most of the reported research in this field was conducted in stagnant environments, which are very different from the physiological environment with dynamic and complex conditions. Therefore, a new strategy must be designed by considering the influence of the dynamic environment.
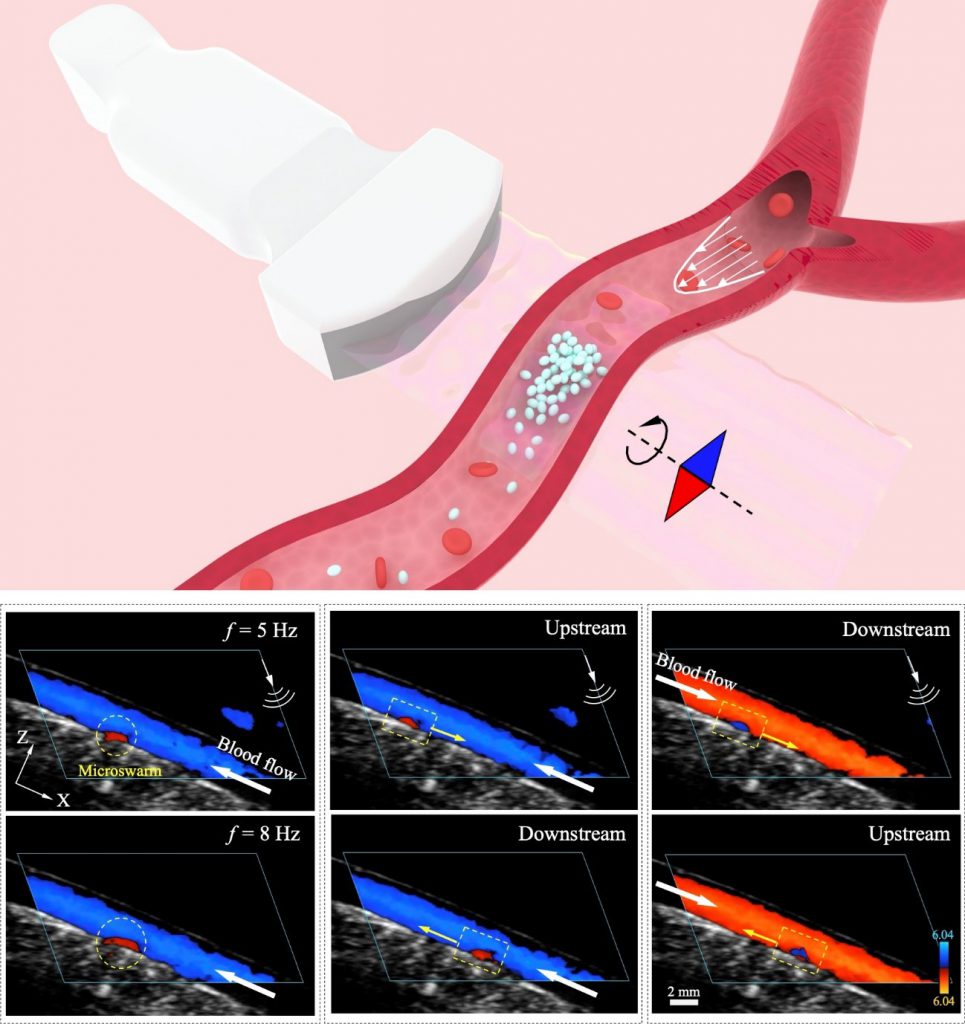
In this work, the team proposed a new strategy to navigate a nanoparticle microswarm in real time under ultrasound Doppler imaging guidance for active endovascular delivery, in order to tackle the challenges of swarm navigation and real-time swarm localisation in dynamic environments. A ultrasound doppler is a noninvasive test that can be used to estimate the blood flow through blood vessels by bouncing high-frequency sound waves (ultrasound) off circulating red blood cells.
Driven by a rotating permanent magnet, a magnetic microswarm was formed and navigated near the boundary of vessels, where the reduced drag of blood flow and strong interactions between nanoparticles enable upstream and downstream navigation in flowing blood. The rotating microswarm affects the motion of blood cells and disrupts normal blood flow, enabling Doppler imaging and real-time tracking from multiple viewing configurations. The dynamic Doppler feedback and the fast response of the magnetic control approach benefit the targeted navigation in different flowing conditions (i.e. stagnant, flowing blood, and pulsatile flow).
Professor Li Zhang remarked that “Our ultimate goal is to apply micro-/nanorobotics technology for translational biomedicine, such as endovascular intervention in the vascular system deep inside the human body, in a minimally invasive manner. This collaborative work with CU Medicine and ETH Zurich paves the way for solving medical problems that are currently difficult to manage with conventional tools.”
Professor Simon Yu, Professor and Chairman of the Department of Imaging and Interventional Radiology, CU Medicine, commented that the application of micro-/nanorobotic technology to endovascular intervention is still at a conceptual stage, but it may have a great potential in bringing new dimensions to embolisation, revascularisation and reconstructive endovascular procedures for the treatment of diseases. “Although there are many uncertainties and challenges ahead, hopefully with the joint expertise of engineering and radiology in our collaborative research, we may be able to see promising advances in this direction.”
Professor Bradley J. Nelson, Professor and Director of the Institute of Robotics and Intelligent Systems (IRIS) at ETH Zurich, Switzerland, commented that “This work is such an important step in moving microrobot technology out of the laboratory and into hospitals to treat patients. Our collaboration with CUHK over the years has been very fruitful. We look forward to even faster progress.”
Dr. Qianqian Wang from CUHK, the first author of this work said, “For the first time, we have achieved swarm control and imaging in such a dynamic environment. Now we are working on more experimental validations to further apply this strategy for in vivo applications and designing autonomous systems to integrate medical imaging techniques with our magnetic control system.”
This work is financially supported by the Research Grants Council (RGC), the HKSAR Innovation and Technology Commission (ITC), Chow Yuk Ho Technology Centre for Innovative Medicine, and the CUHK T Stone Robotics Institute.. Professor Zhang is currently leading a research group on conducting pioneering work with a focus on the development of medical micro-/nanorobots and their control systems. In the last three years, his lab’s researches on microrobotic swarm, biohybrid helical microrobots, remote sensing of bacterial toxin using mobile microrobots and 3D/4D printing of microrobots have been published in top journals, some of which are highlighted in the Hong Kong RGC YouTube Channel (https://youtu.be/l2NQfgW8tSQ) and the Hong Kong ITC website (https://www.itc.gov.hk/enewsletter/180901/en/nanobots_future_surgeons_inside_the_human_body.html).
The full text of the research paper can be found:
Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery
https://advances.sciencemag.org/content/7/9/eabe5914

Professor Li ZHANG leads the microrobots research team at CUHK.
Professor Simon YU.

Professor Bradley J. Nelson, ETH Zurich, participates in this research.
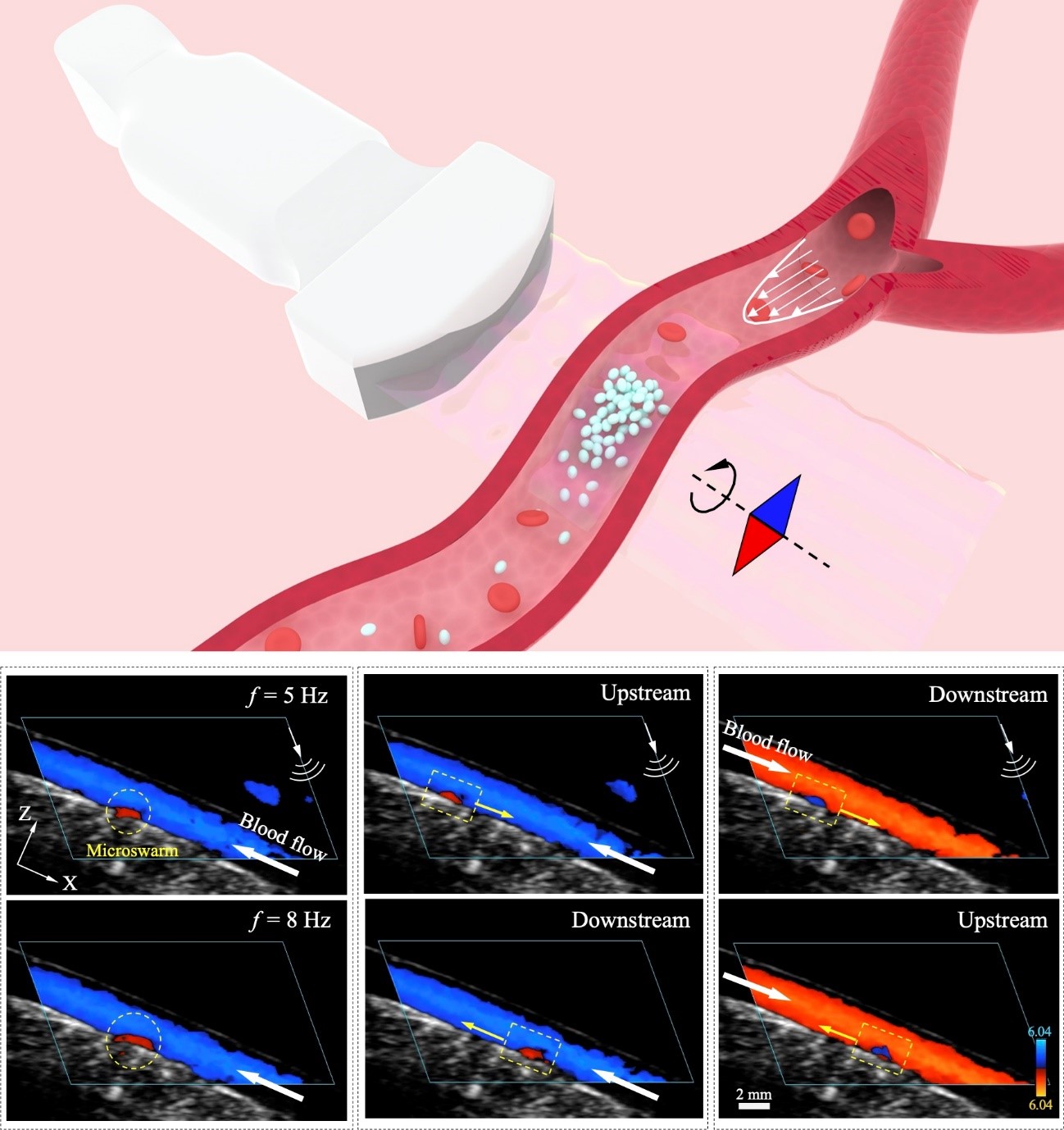
Ultrasound Doppler imaging-guided upstream navigation of a magnetic nanoparticle microswarm in flowing blood.
Professor Zhang Li.