CUHK
News Centre
CUHK conducts world’s first robotic-assisted en bloc resection of bladder tumour with locally developed endoscopic surgical robotic system
The Chinese University of Hong Kong (CUHK)’s Faculty of Medicine (CU Medicine) and Department of Mechanical and Automation Engineering performed the world’s first robot-assisted en bloc resection of bladder tumour (ERBT) in December last year using a locally developed endoscopic surgical robotic system. As of today, the team has completed eight clinical trials, which have shown promising outcomes, removing bladder tumours in a single piece with greater precision than traditional ERBT and with enhanced safety.
The flexible dual-arm endoscopic surgical robotic system allows precise tumour resection
Bladder cancer is a major urological disease and among the top 10 most common cancers in the world. About 75% of bladder cancer patients present with non-muscle-invasive bladder cancer with a tumour size about 3cm or smaller. Last year, CU Medicine proved that ERBT performs better in reducing tumour recurrence than conventional transurethral resection of bladder tumour (TURBT) by 40%, suggesting ERBT should be the first-line surgical treatment for bladder cancer patients with a non-muscle-invasive tumour of 3cm or smaller. However, ERBT is highly dependent on the surgeon’s expertise, as it carries risks of bleeding or bladder perforation.
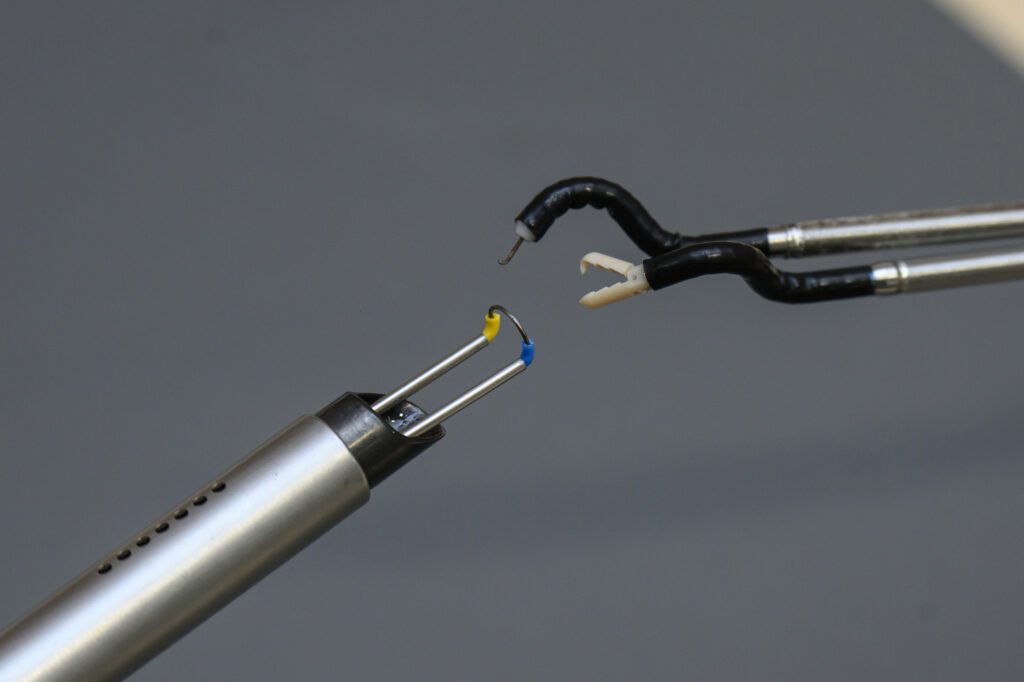
In a conventional manual ERBT procedure, urologists insert a cystoscope into the patient’s urethra and up to the bladder, then resect tumours with the built-in knife equipped in the cystoscope. Since the instrument only has one arm, resection can only be performed from a single angle and direction. Due to the limitation of dexterity, urologists have to constantly adjust the cystoscope lens at the tip to maintain a good view of the surgical field. Therefore, there is a long learning curve to master the skills of ERBT which could take 30-50 cases to become proficient using the conventional approach.
The locally developed endoscopic surgical robotic system with fully flexible robotic arms, the Agilis Robotics IntilumeTM System, consists of an endoscope holder, a robotic positioning cart and a surgeon control chair, compatible with a variety of commercial endoscopes for endoluminal endoscopic surgeries. The system comes with a pair of flexible and compact robotic instruments of 2.8mm to 3.5mm in diameter to achieve tissue retraction and dissection. Each instrument can move in more than five different directions and enable en bloc tumour resection within a tiny space. Doctors operate the system with a pair of remote controls configured for robotic positioning and manipulation, enhancing procedural stability. Professor Kwok Ka-wai, one of the developers of the surgical robotic system and Professor in the Department of Mechanical and Automation Engineering at CUHK, worked along with research team from the Department of Surgery at CU Medicine to conduct clinical trials with the surgical robotic system to test out its clinical performance.
Professor Kwok said: “Our locally developed endoscopic surgical robotic system with fully flexible robotic arms is a rare kind in the market that fits for a range of endoscopic surgeries and is directly compatible with standard endoscopes used by hospitals. We expect the system can soon adopt to treatment of gastrointestinal cancers, uterine conditions, and biliary diseases, where high precision and minimally invasive treatments are essential.”
Endoscopic surgical robotic system enhances success rate and safety of ERBT
The urology team at CU Medicine’s surgery department performed the world’s first robotic-assisted ERBT from December last year to April this year on eight bladder cancer patients using the flexible dual-arm endoscopic surgical robotic system. All procedures were successfully completed, with tumours completely removed from the surgical margins. All patients were discharged within 1-2 days after surgery, six of them have completed clinical observation of 30 days post-surgery with satisfactory recovery.
Dr Peter Chiu Ka-fung, Associate Professor, Division of Urology, Department of Surgery, CU Medicine, said: “The robotic system increases the stability of ERBT operations, reducing the risks of bleeding and perforation, and enhancing surgical precision. It helps lower the risk of recurrence due to residual tumour tissue and speed up patient recovery.”
Professor Ng Chi-fai, Tzu Leung Ho Professor of Urology, CU Medicine, said: “The novel robotic system is simple to learn, aiding young doctors in mastering ERBT and accelerating the learning process. More trained doctors will be able to perform ERBT in the long run, allowing bladder cancer patients to receive treatment earlier.”


CUHK’s Faculty of Medicine and Faculty of Engineering’s Department of Mechanical and Automation Engineering performed the world’s first robot-assisted en bloc resection of bladder tumour (ERBT) in December last year using a locally developed endoscopic surgical robotic system. As of today, the team has completed eight clinical trials, which have shown promising outcomes, removing bladder tumours in a single piece with greater precision than traditional ERBT and with enhanced safety.
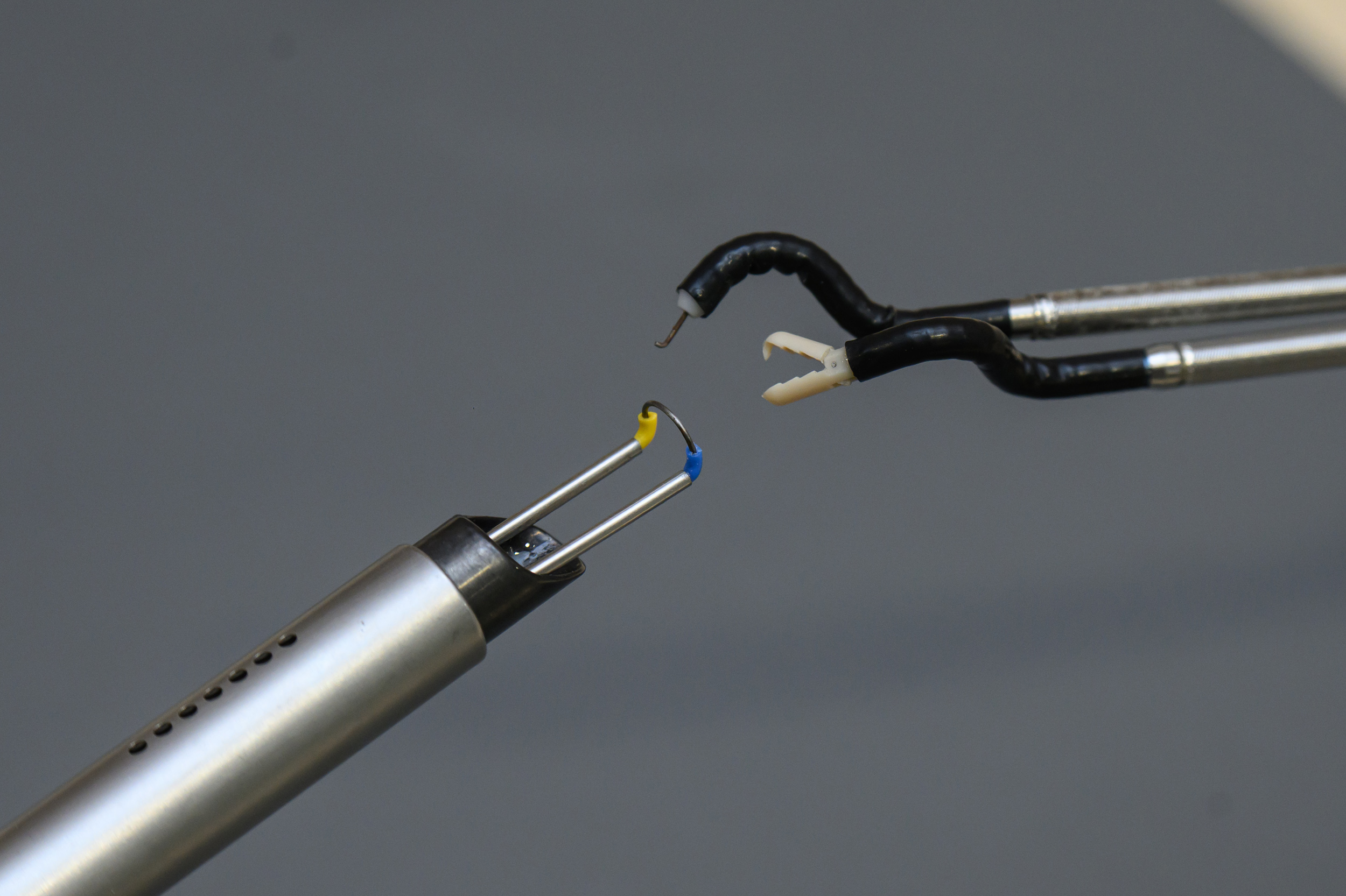
In a conventional manual ERBT procedure, urologists resect tumours with the built-in knife equipped in the cystoscope (left). Since the instrument only has one arm, resection can only be performed from a single angle and direction, resulting in limitation of dexterity.
The locally developed endoscopic surgical robotic system with fully flexible robotic arms (right) comes with a pair of flexible and compact robotic instruments to achieve tissue retraction and dissection. Each instrument can move in more than five different directions and enable en bloc tumour resection within a tiny space.