中大新聞中心
中大人工智能技術 為微型機械人添自動導航
助人體複雜環境內自主遊走
香港中文大學(中大)工程學院研究團隊成功開發一種結合人工智能的微型機械人集群自動導航技術,全球首次讓微型機械人擁有如蜜蜂般的智慧,可成群結隊在人體內的複雜環境遊走,具備自動躲避障礙物的自主巡航能力。研究結果已刊登於國際學術期刊《Nature Machine Intelligence》,有望進一步推動微型機械人在醫學上的臨床應用。
微型機械人能攜帶藥物進入人體,針對性地治療位於狹窄腔道或常規方法難以到達部位的病灶。不過,單一個微型機械人的容量和功能有限,要有效輸送藥物,需要利用外部磁場同時控制數千至數百萬個微型機械人成群進入人體執行任務。面對體內複雜多變的環境,例如不同性質的流體及蜿蜒曲折的腔道,亦大大增加了手動控制的難度和失誤機會,甚或出現部分機械人不受控制的情況。
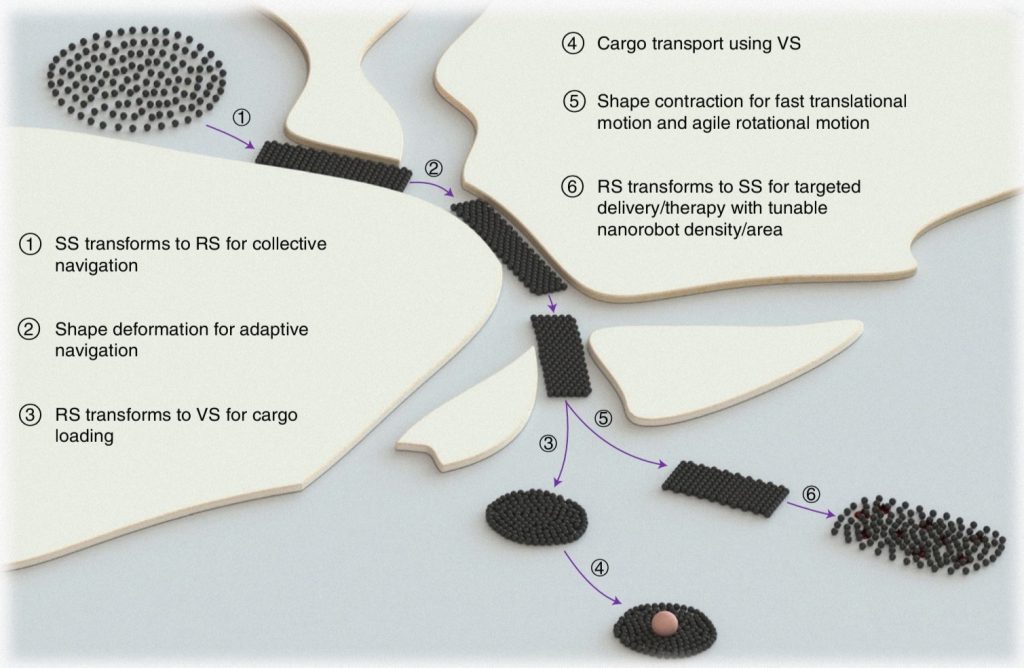
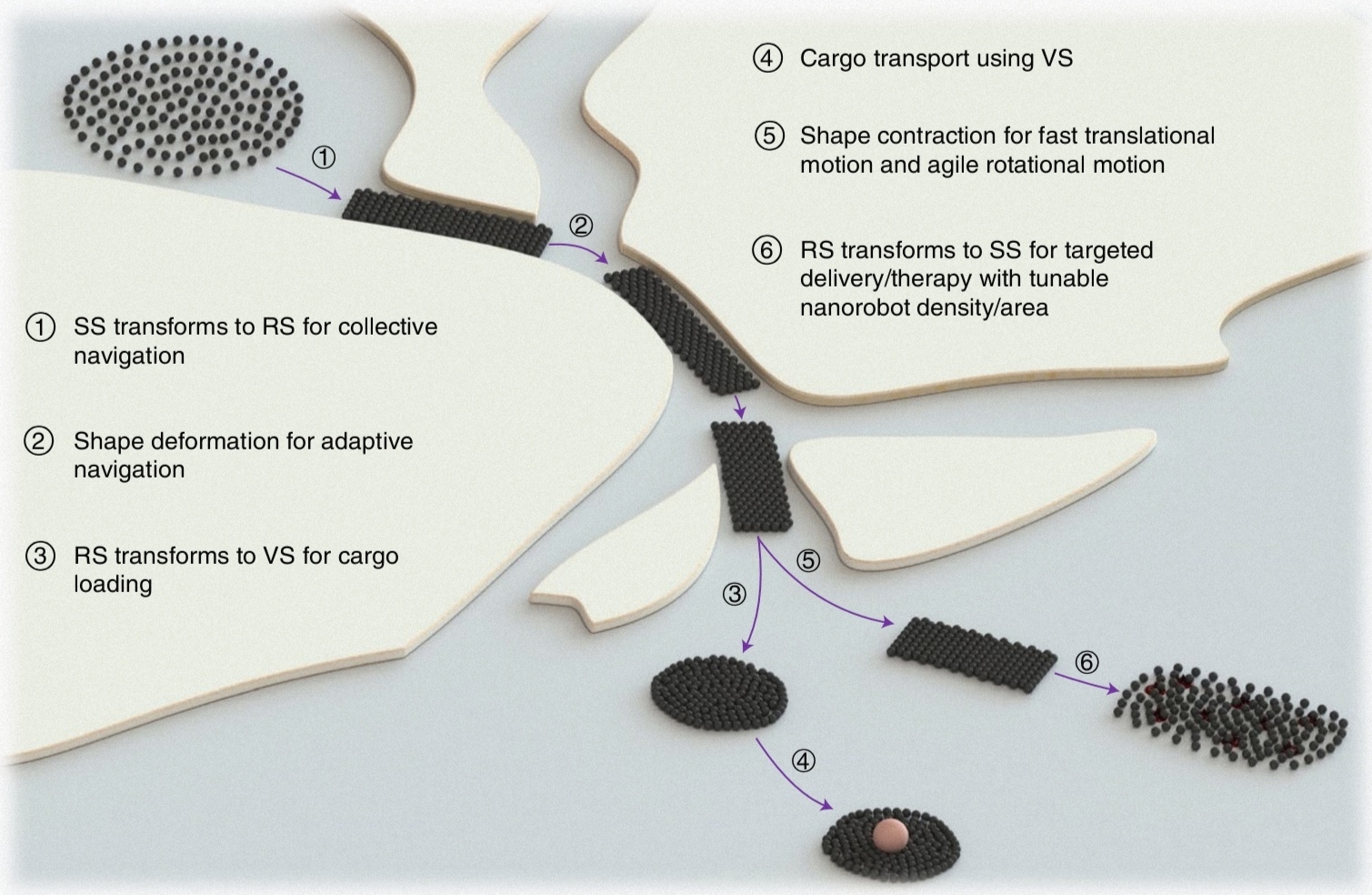
中大機械與自動化工程學系張立教授表示:「蜜蜂、魚類等自然界生物有着非凡的集群智能,牠們可以根據實際環境共同地改變集群形態,以便穿越狹窄、彎曲的通道,避開障礙物,甚或對敵人展開攻擊。雖然微型機械人本體暫時無法裝備『大腦』,但我們可以透過人工智能控制系統,賦予微型機械人集群自主巡航能力,令它們可全自動、自主地在人體內進行任務,減少失誤機會。」
張立教授與中大計算機科學與工程學系竇琪教授的團隊合作,利用深度學習技術和其團隊的研究經驗和數據,建立了一套人工智能微型機械人操控系統。它透過超聲波和X光螢光鏡等成像工具作為微型機械人的「眼睛」,偵測前進路徑上的障礙物,並實時調整移動方向(影片A﹕人工智能系統實時調整微型機械人的移動路徑);系統亦會控制磁場,引導磁性納米粒子機械人轉換集群形態,增加任務的成功機會。
(影片A)
團隊在虛擬人體胎盤環境中測試了人工智能操控下,微型機械人集群的自主巡航能力,結果顯示系統在人體複雜的血管網路環境中亦能有效運作(影片B﹕微型機械人集群成功穿梭複雜的網路到達目的地)。
(影片B)
研究團隊按照不同情境,將微型機械人集群的自主程度分為5個級別(由0級至4級;0代表手動控制、4代表完全自主),並列出每一個自主等級的硬體裝置要求,作為日後微型機械人自動化研究的基礎。例如第1級適用於靜止環境,只需要配備磁場控制系統和成像系統;而第4級可用於動態環境,且毋須人手介入便能完成任務,例如輸送藥物到指定部位,但硬體上則需要配備回饋資訊處理系統和人工智能控制系統等。
張立教授期望,自動導航系統日後可讓醫生在毋須接受特別操作培訓下,亦能利用微型機械人治療病人,例如將標靶藥物直接輸送到病灶。
這項研究得到研究資助局、香港特別行政區創新科技署、周玉浩創新醫學技術中心、中大天石機器人研究所、中大信興高等工程研究所、InnoHK 醫療機械人創新技術中心、中大—中國科學院深圳先進技術研究院機器人與智能系統聯合實驗室支持。
研究論文全文:
Autonomous environment-adaptive microrobot swarm navigation enabled by deep learning-based real-time distribution planning
https://www.nature.com/articles/s42256-022-00482-8
影片來源:
Autonomous environment-adaptive microrobot swarm navigation enabled by deep learning-based real-time distribution planning,
Nature Machine Intelligence, Vol. 4, pages 480–493 (2022)


中大機械與自動化工程學系張立教授(中)的研究小姐,與中大計算機科學與工程學系竇琪教授(右二)合作。